반복적 해안 드론 모니터링의 효율 증진 및 정확도 확보를 위한 고정 구조물 지상기준점 활용 방안
Enhancing Efficiency while Maintaining Accuracy in Repeated Coastal Drone Monitoring through the Use of Fixed Structures as Ground Control Points
Article information
Abstract
정확한 해안지형 측량은 해안관리 측면에서 필수적이다. 최근에는 RTK(real-time kinematic) 수신기를 장착한 드론을 활용하여 해안 지형측량의 효율성을 높이려는 시도가 이어지고 있으나 신뢰성 확보를 위해 여전히 노동집약적인 지상기준점(GCP, ground control point) 측량이 필요하다는 한계가 있다. 본 연구에서는 일반 드론과, RTK 드론으로 획득한 지형 모니터링 데이터를 보정할 때, 고정형 지상기준점을 활용하는 방법을 제안하고 지상기준점 조건에 따른 측량 정확도를 평가하였다. 본 연구는 경상북도 영덕 장사해수욕장에서 일반드론을, 전라북도 부안군 변산해수욕장에서 RTK 드론을 적용하였다. 그 결과 RTK 드론 이용 시 타원체고와 지오이드고 간 약 23.5 m의 오차가 존재함을 확인하였으며, 지오이드고를 보정한 뒤에도 카메라 초점 위치와 센서 오프셋에 의한 약 0 .125 cm 수준의 편차가 잔존함을 발견하였다. 그러나 고정 구조물을 해변 전역에 고르게 배치할 경우, 기존의 이동형 GCP만 활용한 케이스와 유사한 약 0.04 m 내외의 정확도를 확보할 수 있었다. 반면 국부적으로 GCP를 설치하거나 이동형 GCP만 사용할 때는 중앙부 또는 특정 지역에서만 정확도가 향상되거나, 해변 경계부에서 오차가 커지는 경향이 뚜렷하였다. 특히 일반 드론은 RTK 드론보다 센서 기반 위치 정확도가 낮아, 고정형 GCP를 듬성듬성 배치하는 것만으로는 수치표고모형의 충분한 정합도를 얻기 어려웠다. 따라서 일반 드론을 활용할 경우 고정형 GCP를 보다 촘촘히 배치하거나, 부족한 지역에 이동형 GCP를 추가하는 보완 전략이 필요하다. 반면 RTK 드론은 3개 이상의 GCP를 활용하는 경우 국부 설치 케이스에서도 0 .05 m 이내의 정확도가 나타났다. 결과적으로 반복 측량 시 기존에 측량된 안정적 구조물을 GCP로 활용하면 추가 GCP 설치 부담을 크게 줄이면서도 충분한 정확도를 유지할 수 있음을 본 연구에서 확인하였다. 이를 통해 반복적 해안 모니터링 시 기존에 측량된 고정구조물을 기준점으로 활용하면 추가적인 지상기준점 조사에 따른 비용 및 시간 부담을 크게 낮출 수 있을 것으로 기대된다.
Trans Abstract
Accurate coastal terrain measurement is essential for effective coastal management. While drones equipped with real-time kinematic (RTK) receivers have improved the efficiency of beach surveying, laborintensive ground control point (GCP) measurements are still required to ensure reliability. This study proposes using fixed GCPs (i.e., stable structures) to correct and validate topographic data acquired by both a conventional drone and an RTK drone and evaluates how different GCP configurations affect measurement accuracy. Experiments were conducted at Jangsa Beach using a conventional drone and Byeonsan Beach using an RTK drone. The analysis revealed a vertical discrepancy of approximately 23.5 m between ellipsoidal height and geoid height using the RTK drone. Even after geoid correction, an additional offset of about 0.125 cm persisted due to discrepancies between camera focal plane positioning and sensor alignment. However, when fixed GCPs were uniformly distributed across the beach, a DEM accuracy of around 4 cm, comparable to using only mobile GCPs, was achieved. In contrast, locally placed GCPs or configurations relying solely on mobile GCPs resulted in improved accuracy only in specific regions (e.g., the central area), while substantial errors remained in boundary regions. This issue was more pronounced with conventional drones, which have lower sensor-based positioning accuracy than RTK drones. Notably, RTK drones achieved an accuracy within 0.05 m even when using only three or more fixed GCPs, demonstrating that minimal GCP placement can still ensure reliable results. In contrast, conventional drones required denser GCP placement or additional mobile GCPs in underconstrained areas to maintain DEM accuracy. These findings confirm that integrating stable pre-surveyed structures as GCPs can significantly reduce the burden of additional GCP installation while maintaining sufficient accuracy. This approach offers a practical and efficient solution for repeated coastal monitoring, minimizing cost and time while ensuring reliable geospatial data acquisition.
1. 서 론
해안지형 변화의 이해와 예측은 지속가능한 연안관리 및 보호를 위해 필수적이며, 이를 위해 고해상도의 정밀한 지형 정보를 반복적으로 획득하는 것이 중요하다(Carvalho et al., 2020). 전통적인 접촉식 측량 기법인 토탈스테이션이나 실시간위치측정(RTK-GPS, real-time kinematic-global positioning system) 방식은 높은 신뢰성을 제공하나, 측량 과정이 노동집약적이고 많은 시간이 요구되어 시·공간 해상도를 향상시키는 데에 한계가 있다(Lee et al., 2013).
최근에는 Structure-from-Motion Multi-View Stereo(SfMMVS) 기반의 사진측량(photogrammetry) 기법을 적용한 드론 모니터링을 통해 고해상도 3차원 수치표고모형(DEM, digital elevation model)을 구축하여 해안지형 변화를 효과적으로 파악하는 연구가 활발히 진행되고 있다(Pikelj et al., 2018; Genchi et al., 2020; Carvalho et al., 2020; Caballero and Stumpf, 2021; Noh et al., 2023; Noh et al., 2024). 그러나 해안지형은 조석 및 파랑에 의해 지속적으로 변화하기 때문에, 드론 사진측량 결과를 정확한 좌표계에 정합하고 검·보정하기 위해서는 지상기준점(GCP, ground control point)의 확보가 필수적이다. 하지만, 반복적인 드론 측량에서 매번 GCP를 새롭게 측량하는 것은 비효율적이므로, 이를 줄일 수 있는 방안이 필요하다.
이에 대응하기 위한 대안으로 과거 사진측량 자료를 활용한 상호정렬(co-alignment) 기법이 제안되었으나(Cook and Dietze, 2019; Nota et al., 2022), Nota et al.(2022)은 최소 한 개 이상의 GCP가 있어야 드론 센서 좌표를 보완해 수직 정확도를 안정적으로 확보할 수 있음을 보고하였다. 최근 RTK 센서가 탑재된 드론이 개발되어 GCP 없이도 직접 지오레퍼런싱이 가능해졌으나, 드론 내부 RTK 모듈과 카메라 간 오프셋, 영상 초점 위치와 카메라 위치 차이 간 오프셋, 타원체고-지오이드고 차이 등으로 인한 좌표 불확실성이 여전히 상존한다. 또한, 해안 환경에서는 통신 상태가 불안정할 수 있어, RTK 모드에서 발생하는 신호 오류가 사진측량의 정확도에 부정적인 영향을 미칠 가능성이 있다. 이를 보완하기 위해 Taddia et al.(2020)은 PPK(post-processing kinematics) 모드 활용을 제안하였으나, 이 또한 촬영 각도에 민감하기 때문에 하나 이상의 GCP를 참조하는 것이 바람직하다.
드론 기반의 지형 측량에서 GCP의 배치 방식과 개수는 DEM 정확도에 중요한 영향을 미치는 요소로 연구되어 왔다. 기존 연구에서는 GCP의 배치 패턴(예: 균등 분포, 국부 집중, 선형 배치 등) 사진측량의 정확도에 미치는 영향을 분석하고, GCP 개수를 줄이면서도 측량 정확도를 유지하기 위한 최적화 방안을 모색하였다(Forlani et al., 2018; Martínez-Carricondo et al., 2018; Rangel et al., 2018; Villanueva and Blanco, 2019; Zhang et al., 2019; Zhang et al., 2022). 그러나 대부분의 연구는 이동형 GCP를 활용한 측량 정확도 평가에 초점을 맞추었으며, 고정형 GCP를 활용한 연구는 상대적으로 부족한 실정이다.
이러한 연구적 배경을 바탕으로, 본 연구에서는 일반 드론과 RTK 드론을 모두 활용하여 이동형 GCP와 고정형 GCP의 배치 방식이 DEM 정확도에 미치는 영향을 비교·분석하였다. 특히, GCP의 배치 밀도와 공간적 분포가 DEM 정합도에 미치는 영향을 정량적으로 평가하고, 이동형 GCP와 고정형 GCP의 조합을 활용한 최적의 배치 전략을 도출하는 데 중점을 두었다. 이를 통해, 반복적인 해안지형 모니터링에서 GCP 측량 부담을 최소화하면서도 정확도를 유지할 수 있는 실무적 방안을 제시하고자 한다.
2. 실험 방법
2.1 사진측량
드론을 이용한 사진측량은 일반적으로 SfM-MVS 기법을 기반으로 수행된다. SfM-MVS는 서로 다른 위치와 시점에서 촬영한 중첩 영상을 활용하여 고밀도 점군과 수치표고모형을 생성하는 방법으로, 다각도의 영상에 투영된 3차원 정보를 2차원 영상 매칭을 통해 복원한다(Furukawa and Hernández, 2015; Noh et al., 2023; Noh et al., 2024). 본 연구에서는 Pix4dMapper(PIX4D, 2024)를 사용하여 드론 영상으로부터 DEM을 재구축하였다.
일반 드론을 활용한 경우, Pix4DMapper의 기본 설정을 유지하였으며, 특징점 검출을 최대한 활용하고, MVS 단계에서는 1/2 해상도의 영상을 사용하여 최소 매치 수를 3으로 설정하여 최적 밀도의 점군 데이터를 생성하도록 하였다. 반면, RTK 드론을 활용한 경우, 드론의 위치 및 자세 정보의 신뢰도가 확보되므로, 초기 특징점 추출 과정에서 ‘정확한 지리적 위치 정보 및 방향’ 옵션을 활성화하였다. 모든 케이스에서 GCP를 추가한 후에는 지오레퍼런싱 성능을 최적화하기 위해 영상 간 매칭을 증진시키는 ‘수정 및 재최적화’ 옵션을 적용하였다. 모든 케이스에서 DEM을 재구축할 때 노이즈 필터링 및 표면 스무딩 옵션을 활성화하여 데이터의 품질을 개선하였다.
드론 모니터링을 통해 구축된 DEM의 공간 해상도는 주로 카메라의 초점거리(focal length), 투영면과 피사체(지면) 간의 거리 등으로 지상에서 한 화소가 실제로 커버하는 공간적 크기를 계산한 값인 GSD(ground sample distance)로 정해진다. 본 연구에서 사용한 Pix4DMapper는 이러한 비행 조건과 촬영 영상의 해상도를 바탕으로 DEM 공간 해상도를 자동 계산한다. 본 연구의 실험 케이스에서는, 장사해수욕장과 변산해수욕장에서 각각 4.3 cm 및 3.4 cm의 공간 해상도가 산정되었다. DEM 추출 설정을 변경하면 10 cm 등으로 해상도를 낮출 수도 있으나 GCP 활용에 따른 영향을 보다 정밀하게 검토하기 위해 가능한 한 높은 해상도를 유지하는 것이 적절하다고 판단하였다. 이에 따라 본 연구에서는 가장 높은 해상도 조건에서 추출된 DEM을 이용하여 분석을 수행하였다.
해안에서 드론 촬영 시, 파랑으로 인해 수면 위치가 변동하며, 이는 촬영 시점마다 수면 패턴을 달라지게 한다. SfMMVS 알고리즘은 고정된 지형을 가정하여 3D 점군을 재구성하므로, 수면 변화를 위치에 따른 시차로 오인해 신뢰도가 낮은 점군이 생성되거나, DEM에서 수면이 지형으로 잘못 인식될 가능성이 있다(Noh et al., 2023). 변산해수욕장의 경우, 촬영 당시 수면이 포함되지 않은 영역에서 영상이 수집되었으나 장사해수욕장은 소상대가 백사장과 인접해 DEM 재구축 후 물이 포함된 영역을 마스킹 처리하여 분석에 반영되지 않도록 조치하였다.
2.2 연구 대상 지역
일반 드론을 활용한 지형 모니터링은 2022년 10월 30일부터 11월 1일까지 경상북도 영덕군 장사해수욕장에서 수행되었다. 장사해수욕장은 해안선 길이 1.451 km, 해빈 폭 19~56 m로 동쪽을 향해 개방된 지형을 가지며, 하상토의 약 98%가 모래로 구성되어 있다(Kim et al., 2023; Noh et al., 2023). 해당 지역은 석축 호안을 따라 침식이 지속적으로 발생하는 지역으로, 주기적인 지형 모니터링이 필요한 곳이다. 또한, 해수욕장 주변에 주차장, 건물, 장사상륙작전 전승기념관 등의 조형물이 분포하여, 다양한 고정 GCP 배치 조건을 실험하기에 적합한 환경을 제공한다.
RTK 드론을 활용한 모니터링은 2023년 4월 7일 간조 시 전라북도 부안군 변산해수욕장에서 수행되었다. 변산해수욕장은 해안선 길이 약 0.8 km, 백사장 폭 35~65 m로 형성되어 있으며, 간조 시 최대 300~400 m까지 갯벌이 노출된다. 이러한 특성으로 인해, 넓은 영역에서 지형 정보를 획득하고, 다양한 지형 조건에서 사진측량 정확도를 평가하기에 유리하다. 특히, 변산해수욕장은 해안 침식으로 인해 주기적으로 양빈이 이루어지는 지역이므로, 지형 변화를 정밀하게 추적할 필요성이 크다. 또한, 해수욕장 인근에 항구와 건물을 비롯한 다양한 고정 지형이 존재하여, GCP 활용 및 RTK 드론 측량의 정확도를 평가하기에 적합한 환경을 갖추고 있다. 이러한 이유로 본 연구에서는 변산해수욕장을 대상 지역으로 선정하였다.
2.3 자료 수집
본 연구에서는 RTK 수신기가 탑재되지 않은 일반 드론과 RTK 수신기가 장착된 RTK 드론을 각각 경상북도 영덕군 장사해수욕장과 전라북도 부안군 변산해수욕장에서 운용하여 영상 자료를 획득하였다.
일반 드론은 GPS 포지셔닝 시, 수직 및 수평 호버링 정확도는 각각 0.5 m 및 1.5 m 수준이지만, 공간 스캐닝 촬영 시에는 정확도가 다소 낮아질 수 있다. RTK 드론은 위치 정확도가 수직 10 mm + 0.5 ppm, 수평 15 mm + 0.5 ppm 수준이며, 두 드론 모두 4 K(3840 × 2160) 해상도의 영상을 촬영하였다. 촬영 시 정확한 3D 정보 재구축을 위해 double grid 형태의 격자 비행 패턴을 적용하였다. 결과적으로, 장사해수욕장에서는 200 m 고도에서 촬영된 738장의 영상, 변산해수욕장에서는 100 m 고도에서 촬영된 1193장의 영상을 분석에 활용하였다.
지상기준점 측량에는 Sokkia GRX2 RTK-GPS를 사용하였으며, 해당 장비의 측량 정확도는 수직 10 mm + 0.5 ppm, 수평 15 mm + 0.5 ppm 수준이다. 연구지역의 좌표계는 수직좌표계로 KNGeoid18을 수평좌표계로 장사해수욕장에서 Korean East Belt 2010(EPSG: 5187), 그리고 변산해수욕장에서 UTM Zone 52N(EPSG:32652)을 적용하였다.
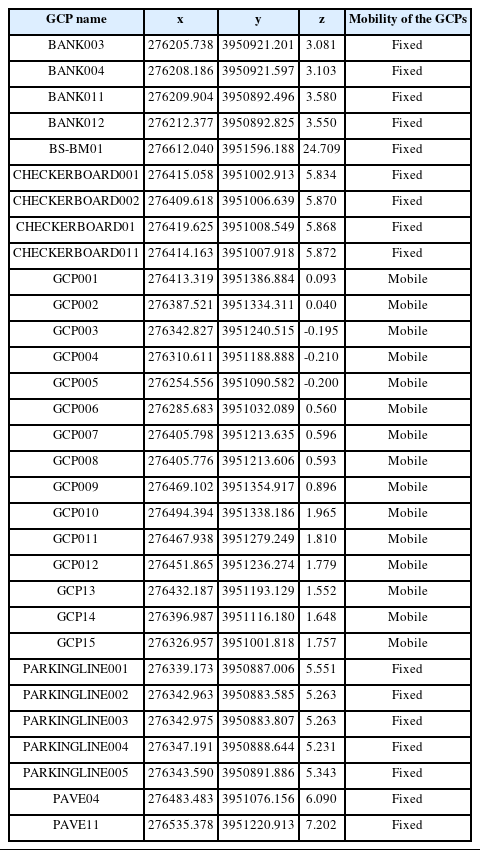
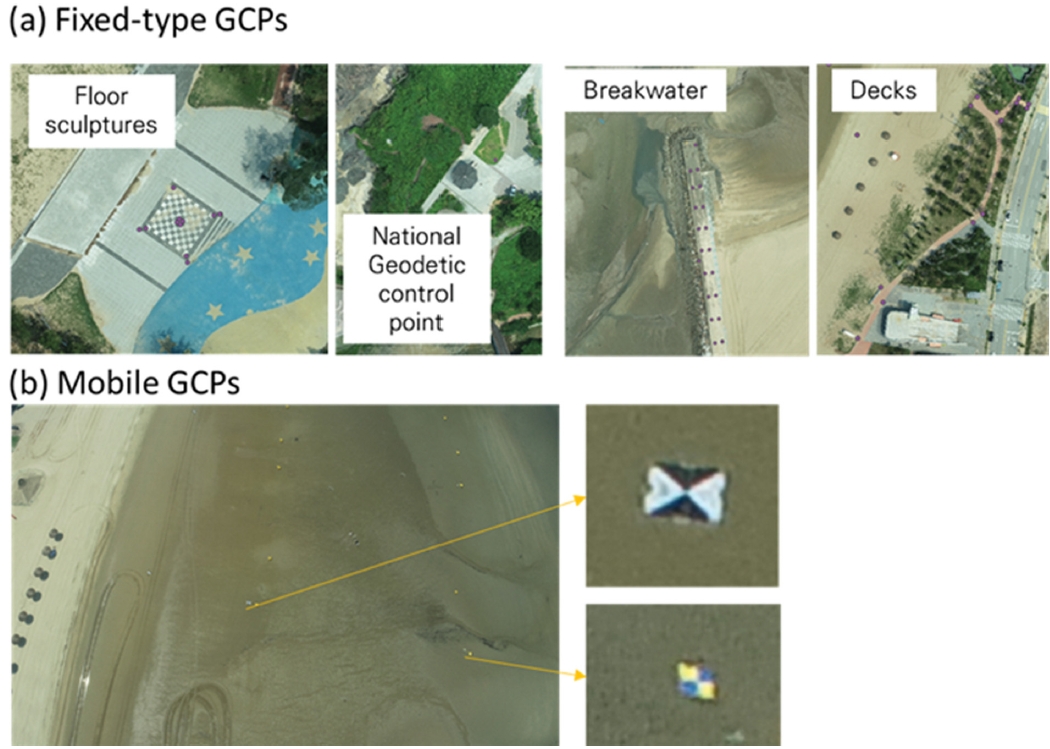
본 연구에서는 고정형 GCP로 해수욕장 인근의 바닥 조형물, 국가 수준점, 방파제 상부, 데크 패턴 등을 활용하였으며, 이동형 GCP는 백사장과 갯벌 위에 대공표지판을 설치하여 배치하였다(Fig. 1). 두 드론 모니터링을 통해 획득한 갯벌을 포함한 정사영상(Ortho-mosaic)과 RTK-GPS 계측 지점의 공간적 분포는 Fig. 2에 나타내었다. 여기서 고정형 GCP는 빨간 점, 이동형 GCP는 초록색 점으로 표시하여, 각 GCP 유형이 해변 및 갯벌 영역에서 어떻게 배치되었는지를 시각적으로 확인할 수 있도록 하였다.
Examplar photographs of fixed-type and mobile GCPs used in this study.
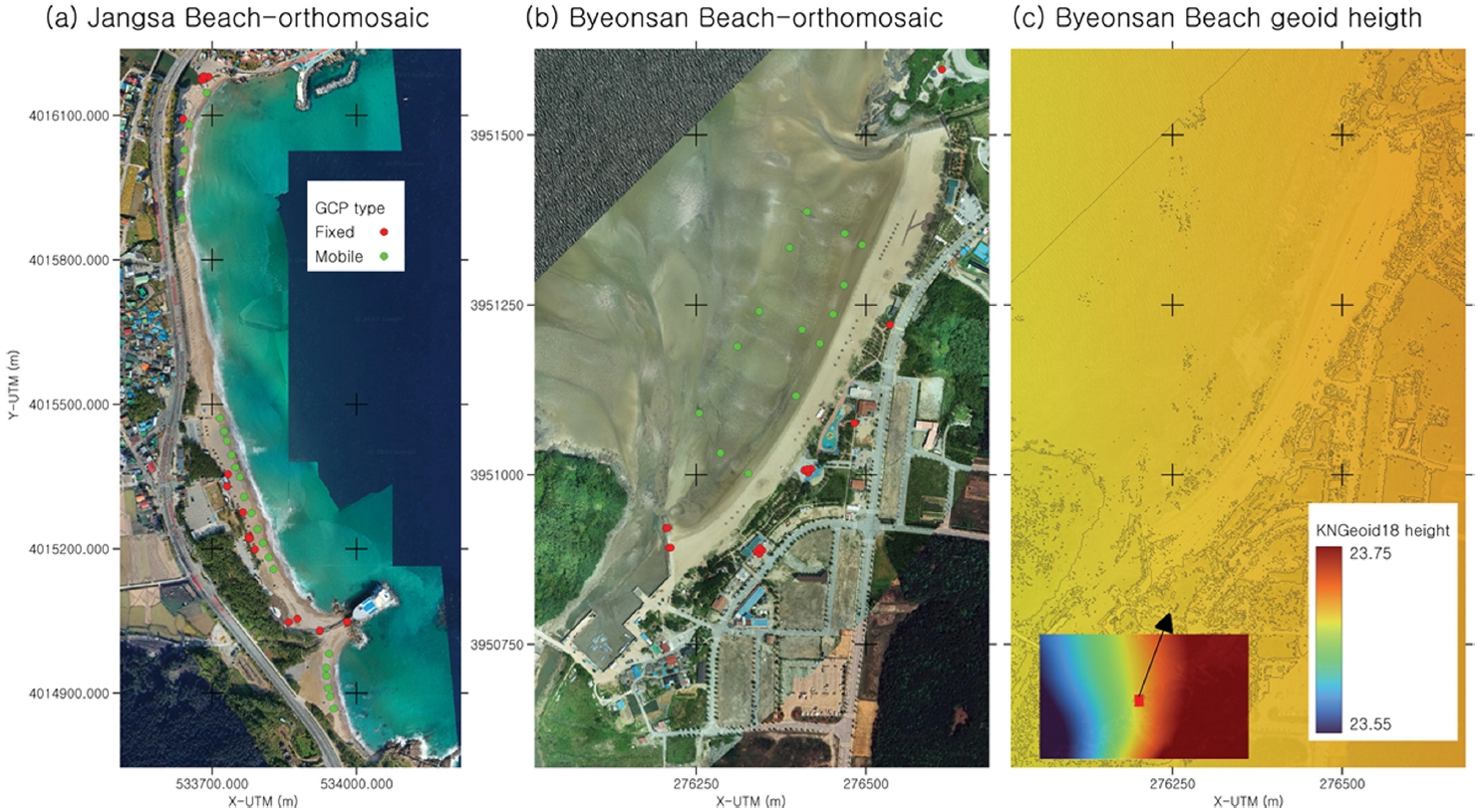
Jangsa Beach orthomosaic, Byeonsan Beach orthomosaic, and Byeonsan Beach geoid.
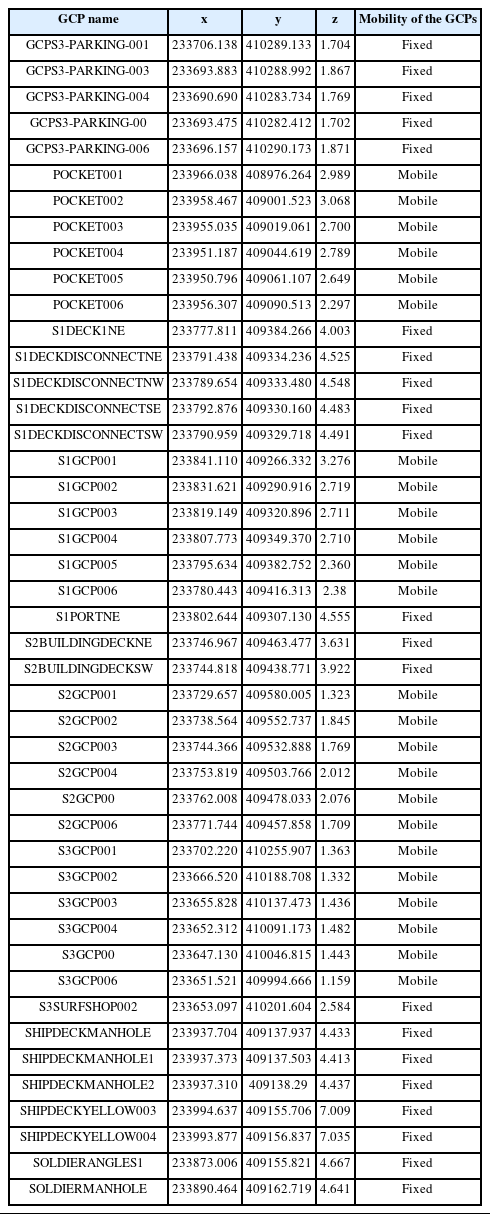
또한, 연구 결과의 재현성 및 향후 활용 가능성을 고려하여, 본 연구에서 활용한 GCP의 정확한 좌표 데이터를 부록에 제시하였다. 이를 통해, 동일한 지역에서 후속 연구를 수행하거나, 다른 기법을 적용한 DEM 비교 분석을 수행할 경우 본 연구의 데이터를 참조할 수 있도록 하였다.
RTK 드론은 타원체고(ellipsoidal height, h) 정보를 제공하므로, 이를 활용하여 생성된 DEM은 기본적으로 타원체고 기준으로 나타난다. 그러나 실질적인 분석 및 활용에서는 중력 방향을 기준으로 한 정표고(orthometric height, H)가 사용된다. 정표고(H)는 타원체고(h)와 지오이드고(N)의 관계(식(1))에 따라 정의되며, 이를 통해 DEM을 정표고 기준으로 변환할 수 있다.
위 식에서 타원체고 h는 RTK 드론 측량 DEM, 정표고 H는 RTK-GPS 측량을 통해, 그리고 지오이드고 N은 KNGeoid18 모형(NGII, 2018)으로부터 취득할 수 있다. 실무 적용성을 고려하여 본 연구에서는 정표고 기준의 DEM 정확도를 주요 성능 지표로 삼았다.
국토지리정보원의 국토정보플랫폼을 활용하여 지오이드고를 표고로 변환하였으며, 장사해수욕장 영역에서 보간한 지도는 Fig. 2(c)에 제시하였다. 연구 지역의 지오이드고 범위는 약 23.668~23.691 m로, 이는 KNGeoid18 지오이드 모델의 상대 정밀도(약 2.39 cm; NGII, 2018) 내에서 변동하는 값이다.
2.4 고정형 지상기준점 활용 실험 조건
본 연구에서는 드론 기반 지형 측량의 정확도를 최적화하기 위해 대공표지판을 활용한 이동형 GCP와 고정형 GCP를 활용하는 다양한 실험을 설계하였다. 실험의 목적은 GCP 배치 방식이 DEM 생성 정확도에 미치는 영향을 정량적으로 분석하고, 이동형 GCP만을 사용할 경우 발생하는 해변 경계부의 정확도 저하를 고정형 GCP가 얼마나 보정할 수 있는지 평가하는 것이다. 또한, RTK 드론을 활용하는 경우에도 GCP 추가 여부가 정확도에 미치는 영향을 검증하여, 최적의 GCP 활용 전략을 도출하고자 하였다.
장사해수욕장과 변산해수욕장에서 각각 45개, 31개의 GCP를 활용하여 실험을 수행하였다. Table 1에는 각 실험의 GCP 활용 여부와 전략에 따른 케이스를 정리하였으며 DEM 보정에 활용된 GCP 개수와 정확도 평가를 위해 활용된 검증용 GCP를 추가로 정리하였다. Fig. 3과 Fig. 4는 각각 장사해수욕장과 변산해수욕장에서 GCP 활용 케이스별로 보정에 사용된 GCP의 위치를 빨간색 별로 지도에 표시한 것이다.
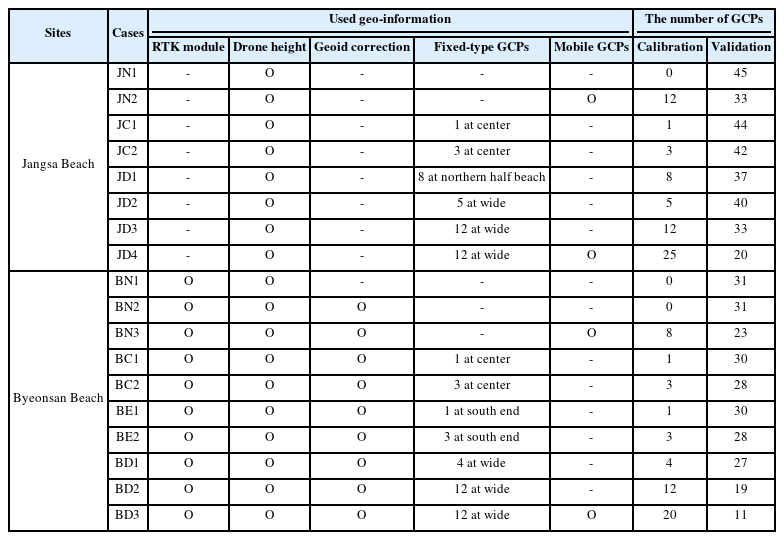
Overview of GCP reference conditions for the test cases in this study
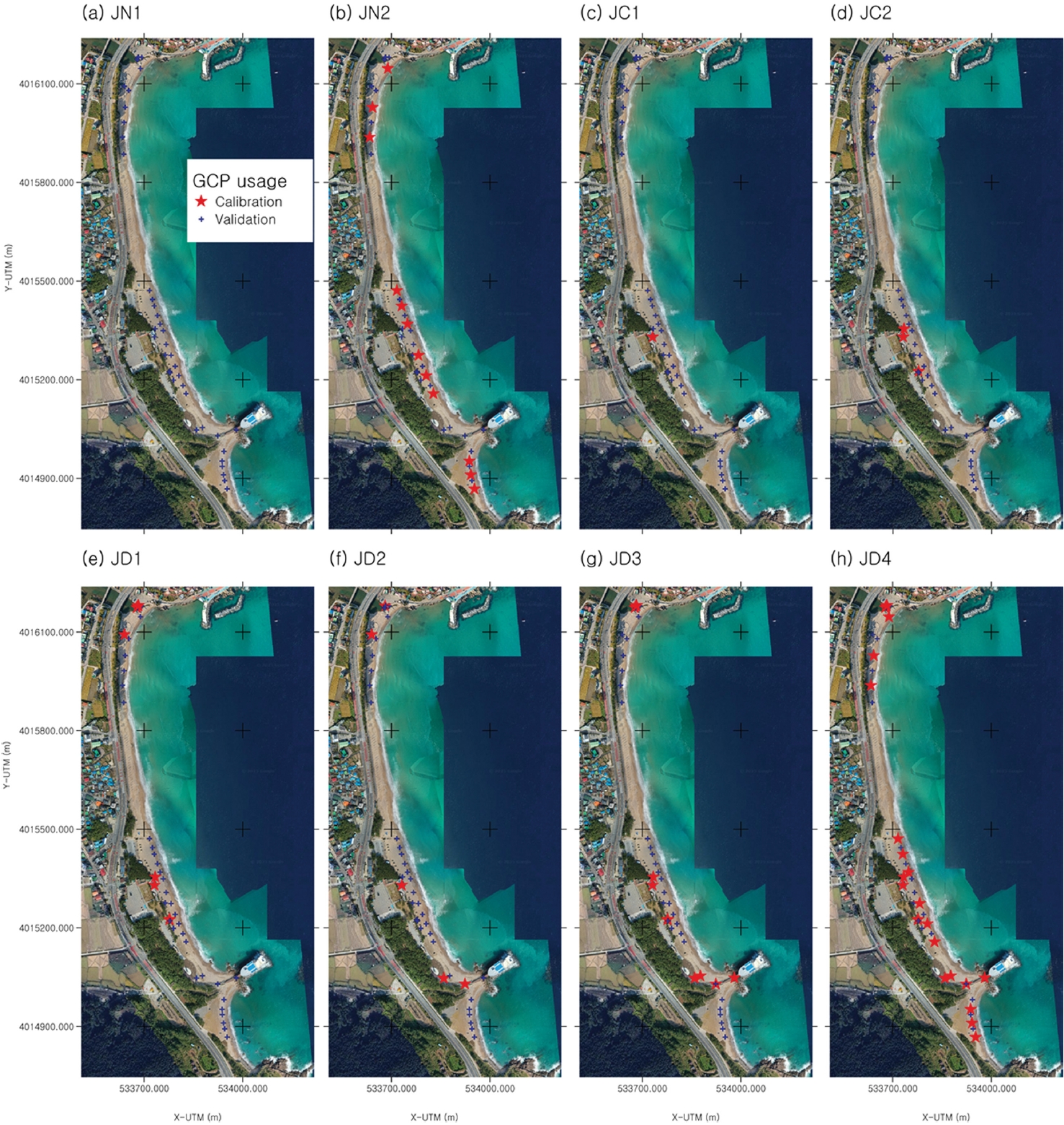
GCP placement maps for various reference condition cases at Jangsa Beach.
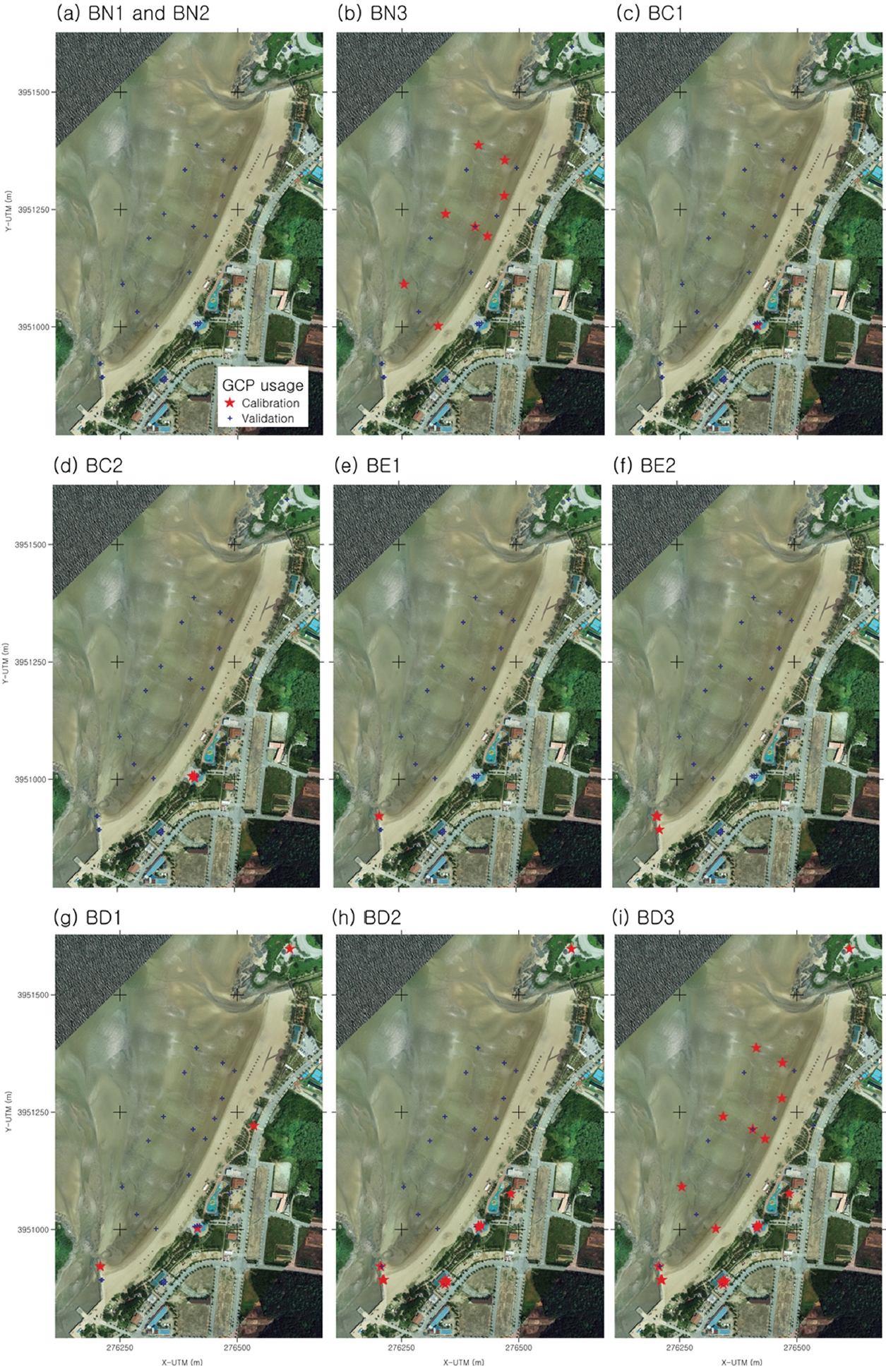
GCP placement maps for various reference condition cases in Byeonsan Beach.
이동형 GCP는 모래사장 내에만 설치되므로, 단단한 구조물 주변 및 해변 경계부에서는 보정 효과가 제한적일 가능성이 있다. 이동형 GCP가 배치된 외부 지역의 정확도의 보정 효과를 검토하기 위해 GCP를 이용하지 않은 JN1, BN1을, JN2와 BN3에서는 백사장에 설치한 대공표지판만을 활용하였다. 변산해수욕장에서는 지오이드고 편차를 보정한 케이스 BN2를 포함하였다.
본 논문에서 중점적으로 다루는 고정 GCP는 오목한 해변의 백사장 배후 지역에 한정되어, 결과적으로 관측 영역의 가장자리에 GCP가 설치되는 형태이다. 한편, RTK 드론을 이용한 SfM-MVS 기법의 경우 영역 가장자리로 갈수록 오차가 커질 수 있으나, 하나 이상의 GCP를 적용하면 이러한 오차가 크게 줄어든다고 알려져 있다(Peppa et al., 2019). 또한 GCP 배치 관련 선행연구에서는 가장자리 부분에 GCP가 설치된 경우, 중앙에 추가 GCP를 배치해도 정확도 개선 효과가 크지 않으며, 오히려 균일한 간격 배치가 더욱 중요하다고 보고했다(Rangel et al., 2018). 따라서 본 연구에서는 중앙에 국부적으로 고정형 GCP를 배치한 실험(JC1, JC2, BC1, BC2)과 해수욕장 한쪽 끝단에 위치한 고정형 GCP를 활용한 케이스(JD1, BE1, BE2)를 도입해 그 영향을 추가로 검토하였다. 아울러, 국부적인 고정형 GCP 실험에서 GCP 개수를 달리 하여 GCP 개수에 따른 개선 효과를 알아보고자 하였다.
넓은 영역에 고정형 GCP를 균등하게 배치한 실험(JD2, JD3, BD1, BD2)에서는 이러한 배치 방식이 DEM의 정합도를 향상에 미치는 효과를 분석하였다. JD2와 BD1에서는 비교적 적은 개수(5개, 4개)의 GCP를 균등 배치하였으며, JD3와 BD2에서는 더 많은 개수(12개)의 GCP를 배치하여 정확도를 비교하였다. 넓은 지역에서도 상황에 따라 비대칭적으로 고정형 GCP를 활용할 수 밖에 없는 경우를 검토하기 위해 장사해수욕장에서 남부 일부의 고정형 GCP를 제외한 JD1을 추가하였다.
이동형 GCP와 고정형 GCP를 함께 활용한 실험(JD4, BD3)에서는 이동형 GCP와 넓게 배치된 고정형 GCP를 조합하여 DEM의 정확도를 극대화하는 방법을 적용하였다. 이동형 GCP는 모래사장의 정확도를 보정하는 역할을 하며, 고정형 GCP는 해변 경계부 및 구조물 주변에서 오차를 줄이는 역할을 수행한다. JD4 및 BD3에서는 가장 많은 수(25개, 20개)의 GCP를 활용하였으며, 전체 실험 중 가장 높은 정확도를 제공할 것으로 판단하여 JD4와 BD3을 기준 케이스로 삼았다.
3. 결 과
본 연구에서는 다양한 GCP 활용 방식에 따른 DEM의 편향(Bias) 및 오차의 표준편차(σe)를 분석하여, GCP 배치 전략이 DEM 정확도에 미치는 영향을 정량적으로 평가하였다. Table 2는 각 실험 케이스별 검증 세트 GCP의 Bias와 σe를 정리한 것이다. 또한, 두 해수욕장에서 기준케이스와의 상대적인 Bias 및 표준편차 비율을 제시함으로써, GCP 배치 방식이 DEM 정합도에 미치는 영향을 비교하였다. 여기서 bias와 σe는 각각 식(2)와 식(3)과 같이 정의된다.
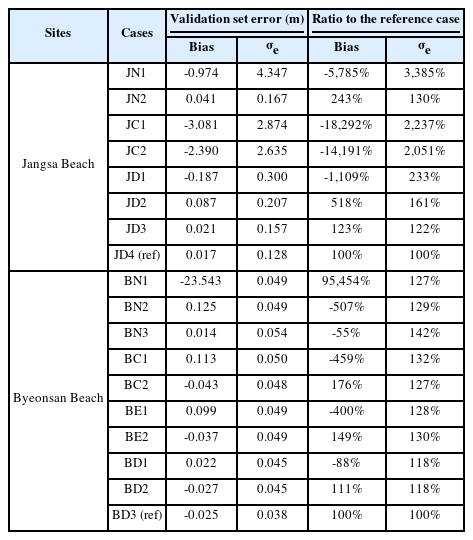
DEM reconstruction accuracy of the validation GCPs with respect to GCP reference condition cases
여기서, zobs, i는 i번째 정표고 관측값, zDEM, i는 i번째 관측값의 수평위치에서의 DEM 표고 값; n은 분석 대상 자료의 수; ei와 μ(ei)는 각각 오차값과 오차의 평균이다. 자료의 수 n은 케이스별로 상이하며 Table 1의 validation에 명시된 값과 같다. 편향치는 DEM이 실제 지면 대비 얼마나 높거나 낮게 치우쳐 있는지에 대해, 표준편차는 DEM 정밀도에 대한 지표로 해석할 수 있다.
Fig. 5(a)와 6(a)는 가장 많은 GCP를 사용한 케이스(JD4, BD3)의 표고 등고선을 나타낸다. 또한, Fig. 5(b)-(e)와 6(b)-(e)에는 JD4와 BD3을 각각 장사해수욕장과 변산해수욕장의 기준 케이스로 설정하고, 이들을 기준으로 이동형 GCP만 사용한 경우, 중앙부 고정형 GCP만 활용한 경우, 비대칭 배치 또는 적은 개수의 GCP를 넓은 영역에 분산 배치한 경우 등 다양한 조건에서의 상대 표고차를 시각화하였다. 여기서 붉은 색은 기준 케이스보다 표고가 높은 지역, 파란색은 낮은 지역, 하얀색은 표고차가 거의 없는 지역을 의미한다.
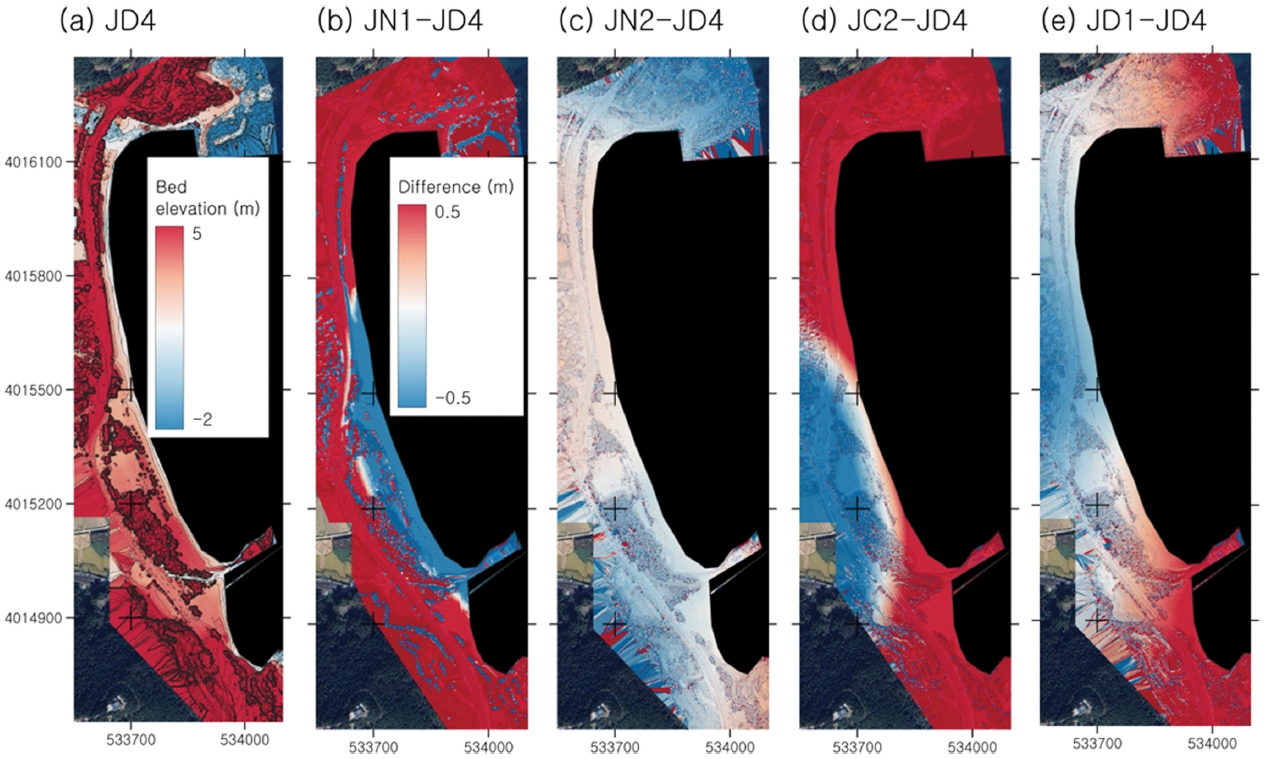
Bed elevation contour of JD4 and its relative bed difference, and relative bed differences from JD4 for JN1, JN2, JC2, and JD1 in Jangsa Beach.
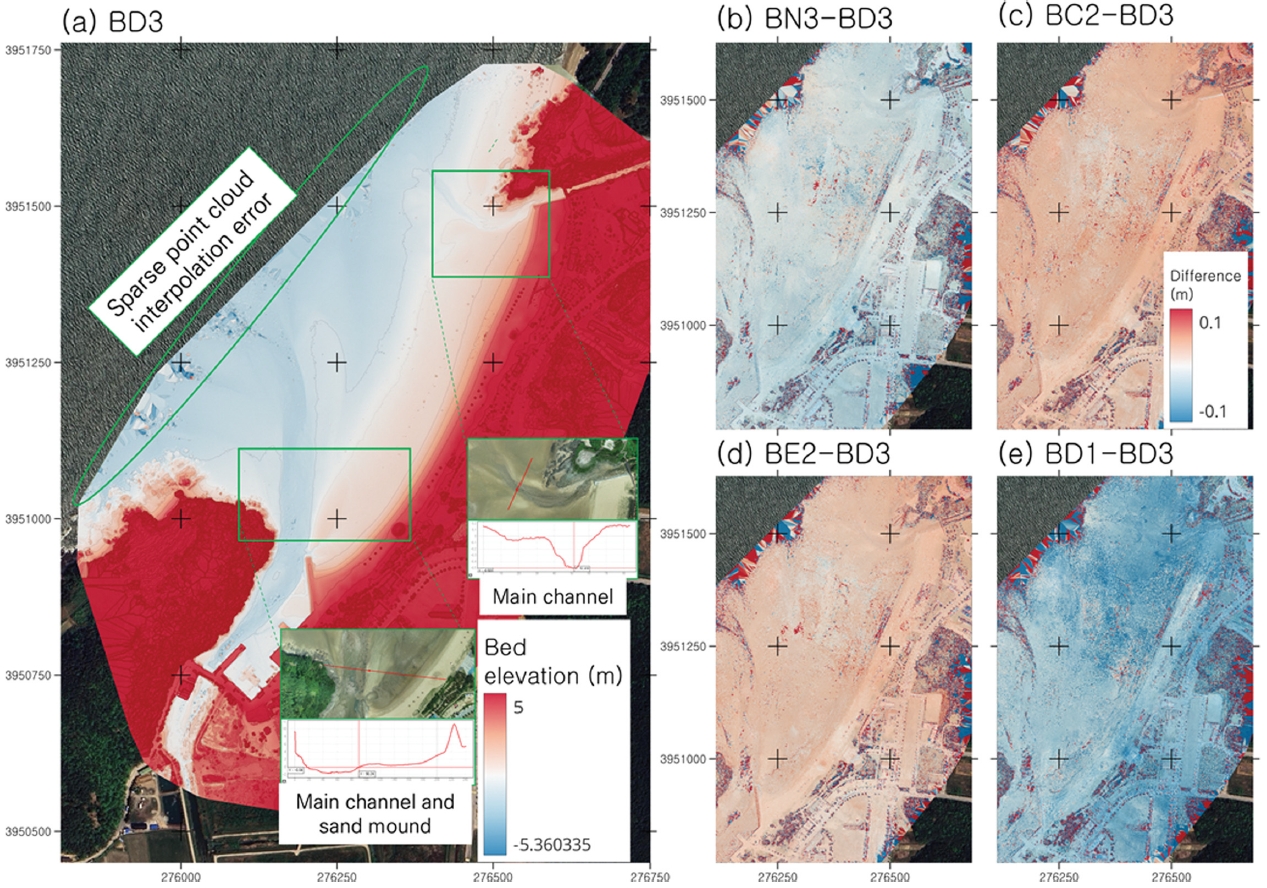
Bed elevation contour of BD3 and its relative bed difference, and relative bed differences from BD3 for BN3, BC2, BE2, and BD1 in Byeonsan Beach.
장사해수욕장은 길이에 비해 해빈 폭이 좁으며, 북쪽 끝단에 하천 유입부와 방파제가 있다. 이 아래로 약 700 m 구간은 호안이 형성되어 있어, 장사해수욕장 중 가장 해빈 폭이 협소한 지역이다. 남쪽에는 선박 형태로 건설된 장사상륙작전 전승기념관이 바다를 향해 백사장을 두 구역으로 구분한다. 전승기념관으로 통하는 데크에도 고정형 GCP를 배치하여 국부적으로 표고가 상승한 지점이 정확히 재현되었다. 변산해수욕장 북동쪽과 남서쪽 끝에는 담수가 유입되는 수로가 각각 존재하며, 모니터링 당시 백사장 남쪽에는 모래 더미가 적치되어 있었다. 재구축된 DEM은 이러한 지형 특징을 잘 반영해, 사진측량 결과가 양호함을 확인할 수 있다. 다만 북서쪽 갯벌 경계 인근에서는 다각형 형태로 매끄러운 영역이 나타나는데, 이는 Pix4DMapper가 조사 범위 가장자리처럼 점군 밀도가 낮은 구역을 공간 보간하는 과정에서 발생한 현상이다.
장사해수욕장의 기준 케이스(JD4)는 Bias 0.017 m, σe 0.128 m로 높은 정확도를 보였다. 반면 드론 GPS 정보만을 사용한 JN1은 Bias가 -0.974 m, σe가 4.347 m로 치솟아, 기준 케이스 대비 각각 -5785%, 3385% 증가하였다. 이는 GCP 없이 드론 GPS 정보만으로 DEM을 생성하면 광범위한 구간에서 과대 또는 과소 산정이 나타날 수 있음을 시사한다. Fig. 5(b)에서 해수욕장 남쪽 일부를 제외하고 나머지 지역에서는 0.5 m 보다도 고도를 높게 평가하는 것을 확인할 수 있다. 이동형 GCP를 추가한 JN2는 Bias 0.041 m, 표준편차 0.167 m로 다소 개선되었지만, 여전히 JD4 대비 Bias 243%, 표준편차 130% 수준이다. Fig. 5(c)에서 다른 케이스보다 오차가 전반적으로 작게 분포했으나, 남쪽 전승기념관 인근 백사장은 표고가 과소평가되고 나머지 지역은 과대평가되었다. 이는 GCP가 부족한 구간에서 잔존 오차가 발생했을 가능성을 보여준다.
고정형 GCP를 중앙부에만 두었던 JC1과 JC2는 Bias가 각각 -3.081 m, -2.390 m로, 기준 케이스 대비 -18,292%, -14,191%의 큰 오차를 보였다. Fig. 5(d)는 중앙부 인근을 제외한 원거리 지점에서 DEM 왜곡이 가중될 수 있음을 보여준다. 북쪽에만 고정형 GCP를 배치한 JD1은 Bias -0.187 m, σe 0.300 m로, 기준 케이스 대비 편차는 -1,109%, 표준편차는 233% 증가하였다. GCP가 없는 남쪽 지역의 정확도 개선폭이 제한적이었기 때문이다(Fig. 5(e)). 반면 해변 전역에 고정형 GCP를 분산한 JD2, JD3는 각각 Bias 0.087 m와 0.021 m, σe 0.207 m와 0.157 m로, 국부 배치보다 나은 결과를 보였다. 특히 JD3는 JD4 대비 편차와 σe가 각각 123%, 122%로, 이동형 GCP 없이도 기준 케이스와 거의 동등한 수준에 이르렀다.
변산해수욕장에서는 기준 케이스(BD3: Bias -0.025 m, 표준편차 0.038 m)와 비교했을 때, RTK 드론 GPS만 사용한 BN1에서 Bias가 -23.543 m(약 95배 증가)에 달해 가장 큰 편향을 기록했다. 지오이드고 편차를 보정한 BN2도 Bias 0.125 m(-507%), 표준편차 0.049 m(129%)로 크게 개선되었으나, 여전히 기준 케이스 대비 편차가 커 추가 보정이 필요함을 보여준다.
BN2에서 잔존하는 편차는 초점(focal point) 위치와 실제 카메라 위치의 오프셋 문제에서 기인할 가능성이 높다. RTK 드론 영상은 카메라 대신 RTK 안테나 중심부를 기준으로 오프셋이 보정되지만, SfM-MVS 알고리즘은 카메라 초점 위치를 기준으로 지형을 매핑하기 때문이다(Forlani et al., 2018; Taddia et al., 2019). 이로 인해 안테나-카메라 간 오프셋, 촬영각도, 초점 위치 차이에 따라 z축뿐 아니라 x·y축에서도 오차가 발생할 수 있다. 이러한 오차는 RMSE가 최대 2 m까지 커질 수 있으나, 카메라의 내부·외부 파라미터를 보정하거나 GCP를 활용하면 상당 부분 완화 가능하다(Taddia et al., 2019). 본 연구에서 확인된 편향 또한 이러한 센서 오프셋 알고리즘의 한계와 관련된 것으로 추정된다.
이동형 GCP만 사용한 BN3은 기준 케이스 대비 Bias가 -55%로 우수했지만, σe는 0.016 m(42%) 정도 더 크게 나타났다. Fig. 6(b)에 따르면 전반적인 공간 편차는 Fig. 6(c)~(e)보다 작지만, 이동형 GCP가 없는 갯벌 중앙부에서 국부적 큰 오차가 발생해, 고도가 과대·과소평가가 불규칙하게 뒤섞이는 양상을 보였다. 이는 Bias는 작아도 표준편차가 커지는 결과를 잘 설명한다.
고정형 GCP를 국부 배치한 BC1(중앙)과 BE1(해변 한쪽)에 대해서도, 각각 Bias 0.113 m와 0.099 m로 기준 케이스 대비 -459%, -400% 수준을 보이지만, 표준편차가 0.049~0.050 m 범위로 여전히 증가세가 나타났다. 흥미로운 점은 Fig. 6(c)와 Fig. 6(e)의 전반적인 양상이 비슷하고, 오히려 갯벌 부분에 편차가 0에 가까운 지역과 오차가 큰 지역이 혼재한다는 것이다. 비슷한 조건에서 GCP 개수를 늘려 배치한 BC2와 BE2는 Bias가 각기 -0.043 m와 -0.037 m로 낮아져, BC1·BE1 대비 오차 폭이 줄었음을 알 수 있다. BN3, BC2, BE2 의 결과는 국부적 배치라도 세 개 이상의 GCP가 보정에 활용될 경우, BD3와 크게 다르지 않은 정합도를 확보할 가능성이 있음을 시사한다. 결국, BD1과 BD2(해변 전역에 균등 배치)는 Bias 0.022 m, -0.027 m, 표준편차 0.045 m 수준으로서, 기준 케이스(BD3)와 오차 차이가 크지 않게 유지되었다(Fig. 6(e)). 이는 약 1 cm의 RTK-GPS 센서 오차를 감안했을 때, 고정형 GCP만이라도 고르게 분산 배치하면 충분한 정확도를 낼 수 있음을 보여주는 사례다.
본 연구의 결과를 종합하면, RTK 드론을 활용한 변산해수욕장이 일반 드론을 활용한 장사해수욕장보다 전반적으로 높은 DEM 정합도를 제공하였으나, RTK 드론만으로는 충분한 정확도를 확보하기 어려우며, 추가적인 GCP 보정이 필요함을 확인하였다. 이동형 GCP는 모래사장 내부에서는 높은 정합도를 보였으나, 이동형 GCP와 멀리 떨어진해변 경계부에서는 오차가 증가할 수 있다. 마찬가지로 고정형 GCP를 중앙에만 배치할 경우, 중앙부의 정합도는 높아지지만 경계부의 오차가 증가하였다. 그러나 GCP를 넓게 균등하게 배치한 경우(JD3, BD2), 기준 케이스(JD4, BD3)와 비교했을 때 DEM 정합도가 충분히 유지되었다.
RTK 드론은 지오이드고를 보정하는 것만으로도 비교적 높은 정확도를 얻을 수 있었지만, 카메라 초점 위치와 센서 오프셋에서 기인하는 편차는 여전히 존재하였다. 다만 최소한의 GCP로도 DEM 품질이 크게 떨어지지 않았는데, 이는 RTK 드론 자체의 절대 좌표 정보가 어느 정도 신뢰성을 갖고 있어 센서 보정을 수행하면 잔존 오차가 크게 줄어들기 때문이다. 따라서 RTK 드론 활용 시, 고정형 GCP를 소수만 배치해도 실무적으로 효율적인 DEM 구축이 가능하다.
한편 일반 드론은 RTK 드론보다 센서 위치 정확도가 낮아, 고정형 GCP를 넓은 영역에 빈틈없이 배치하거나 부족 지역에 이동형 GCP를 추가로 설치하는 식의 보완 전략이 필수적이었다. 만약 이러한 GCP 최적화 배치가 어려울 경우, 상호정렬 기법을 적용해 기존 사진측량 자료를 참조하는 방안도 대안이 될 수 있다(Cook and Dietze, 2019; Nota et al., 2022).
결론적으로, 고정형 GCP는 이동형 GCP와 함께 사용할 때 해변 경계부 등의 정합도를 높이는 데 기여하며, 고정형만 단독으로도 해변 전역에 균등 분산하면 전체 GCP 활용 케이스와 거의 유사한 정합도를 달성할 수 있었다. RTK 드론은 GCP 수를 줄여도 정확도가 크게 떨어지지 않는 반면, 일반 드론은 고정형 GCP를 촘촘히 배치하거나 이동형 GCP 또는 상호정렬 기법을 추가 적용해야 충분한 DEM 정확도를 확보할 수 있다. 이 같은 결과는 반복적인 해안 모니터링 시 GCP 측량 부담을 줄이면서도 안정적인 DEM 품질을 유지할 수 있는 현실적 전략을 제시한다.
4. 결 론
본 연구는 해안 지형을 반복적으로 계측하는 과정에서 필요한 지상기준점 측량 부담을 줄여 드론 모니터링의 효율성을 높이는 방안을 제시하였다. 핵심 개념은 모니터링 대상 지역을 재방문할 때에도 변하지 않는 고정 구조물을 고정형 GCP로 활용함으로써, 지오이드고 보정 및 드론 센서 위치 오차 등으로 인한 DEM 품질 저하를 최소화하는 것이다. 이를 검증하기 위해 경상북도 영덕군 장사해수욕장(일반 드론)과 전라북도 부안군 변산해수욕장(RTK 드론)을 대상으로 RTK 드론 측량 및 RTK-GPS를 이용한 검·보정을 수행하였다.
본 연구의 주된 결과는 아래와 같다.
(1) 일반 드론을 활용한 경우, 비행고도를 기준으로 DEM을 구축하기 때문에 실제 드론의 표고와 비행고도의 차이에서 발생하는 오차가 잔존하며, 이에 따라 GCP 배치 및 개수에 대한 정확도가 RTK 드론보다 더욱 민감한 경향을 보인다. 즉, RTK 드론은 단독으로도 상대적으로 높은 정확도를 유지할 수 있는 반면, 일반 드론에서는 GCP 배치 방식이 DEM 품질을 결정하는 중요한 요인이 된다. 따라서, 일반 드론을 활용할 경우 GCP의 개수 및 배치 최적화가 더욱 중요하며, 이를 고려한 측량 전략이 필요하다.
(2) RTK 드론을 활용한 지형측량은 기본적으로 높은 정밀도를 갖추고 있으나, 지오이드고의 공간적 변동성을 고려할 때, 하나 이상의 GCP를 통한 검·보정이 필요하다. 이는 RTK 드론이 제공하는 절대 좌표 정보만으로는 공간적 오차가 완전히 제거되지 않음을 의미하며, 지오이드고 변동 및 센서 장착 오프셋에 의해 발생하는 오차를 줄이기 위해 GCP의 보정이 필수적이다.
(3) 지오이드고를 조정하고 드론 내부 센서 장착 조건(카메라-RTK 모듈 간 오프셋)이 미리 보정되더라도, 영상의 초점 위치와 카메라 위치 간 오프셋으로 인해 잔존하는 수직 편향 오차가 발생할 수 있다. 이는 드론의 카메라 파라미터, 기체 자세, 촬영 각도 등에 따라 발생하는 오차이며, 이를 효과적으로 보정하기 위해서는 적절한 GCP 배치가 필수적이다.
(4) 고정 구조물 GCP만을 활용하더라도, 대공표지판을 포함한 다수의 GCP를 활용한 경우와 유사한 수준의 DEM 보정 효과를 얻을 수 있으며, 정확도 유지 효과는 RTK 드론을 활용할수록 더욱 두드러진다. 이는 반복 모니터링 시 고정형 GCP만을 활용하여 추가적인 GCP 측량 없이도 높은 DEM 정확도를 유지할 수 있음을 시사한다.
(5) 고정형 GCP는 이동형 GCP와 함께 활용될 때에도 DEM 정확도 향상에 기여할 수 있다. 이동형 GCP는 주로 백사장과 갯벌과 같이 연약지반에서 배치되므로, 이동형 GCP를 아우르는 영역 바깥쪽에서는 신뢰도를 확보하기 어려울 수 있다. 그러나, 고정형 GCP를 적절히 배치하면 이동형 GCP가 포함된 영역뿐만 아니라 그 외곽 지역에서도 DEM의 신뢰도를 높일 수 있다. 특히, 방파제, 도로, 구조물과 같은 안정적인 지형을 활용하면 GCP를 매번 재설정할 필요 없이 넓은 영역에서 측량 신뢰도를 유지할 수 있어 실무적인 효율성이 크다.
본 연구에서 제안한 고정 구조물 GCP 활용 전략은 다양한 환경에서 반복적인 지형 모니터링에 적용될 수 있다. 이를 통해, 향후 반복 조사 시 추가적인 GCP 측량으로 인한 비용 및 시간 부담을 크게 절감하고, 신뢰성 높은 지형 자료 확보를 가능하게 함으로써 해안지형 변화 관측 및 관리에 기여할 수 있을 것으로 기대된다.
Notes
감사의 글
이 연구는 정부(과학기술정보통신부)의 재원으로 한국연구재단의 지원을 받아 수행되었습니다(RS‐2024-00336456).